

Head: Prof. Frank Flechtner
Typical Earth system parameters are parameters which describe the Earth's geometrical and physical shape (ground station coordinates or gravity field spherical harmonic coefficients) and its orientation in space (Earth orientation parameters (EOP)). We estimate these Earth system parameters based on observations of satellite orbit dynamics which can be observed by various types of tracking data such as Satellite Laser Ranging (SLR), Global Navigation Satellite System (GNSS), Doppler Orbitography and Radiopositioning Integrated by Satellite (DORIS) and other data. The satellite orbit dynamics are driven by conservative (the gravity field) and non-conservative (the drag by the atmosphere, pressure by solar radiation, etc.) forces. Both these types of forces are modeled and parameterized in our core Earth Parameter and Orbit System software package EPOS. By evaluating the observations in EPOS in a least squares sense, the parameters we are interested in can be inferred with high accuracy and at the same time highly accurate orbits can be determined.
For this we
- keep and develop knowledge in satellite orbit dynamics,
- maintain and develop our sophisticated software package EPOS and its nucleus EPOS-OC
- integrate a huge ensemble of terrestrial and space-borne observation types and space missions in our solutions
- solve for orientation, center location and shape of the Earth
- share our findings and take an active part in the IAG services "International Earth Rotation and Reference Systems Serviece" (IERS), "Internatinal Laser Ranging Service" (ILRS), "International DORIS Service" (IDS), "International GNSS Service" (IGS) and "International GNSS Service" (IGS)
- deal with fundamental physics by cooperating internationally in testing of the general relativity principle by means of satellite dynamics.
The most important projects of Topic 3 are therefore:
- Development and maintenance of the Earth Parameter and Orbit System Software EPOS
- Running an Analysis Center of IAG’s International Laser Ranging Service (ILRS AC)
- Running an Associated Analysis Center of IAG’s International DORIS Service (IDS AAC)
- Operation of the Potsdam SLR station
- Precise orbit determination for geodetic satellites
- Precise orbit determination for GNSS satellites
- Precise orbit determination for radar altimetry satellites
- Operational precise baseline determination for the TanDEM-X mission
- Operational Rapid Science Orbits (RSO) and Near real-time (NRT) orbit determination for processing of GNSS radio occultation data
- Precise trajectories of ships and aircrafts
- Testing principles of general relativity
Orbit Prediction System
Precise orbit predictions are service products to support Satellite Laser Ranging (SLR), pre-processing of mission data and mission operations. In all cases it is necessary to know the position of the satellite at some time in the future with a dedicated accuracy depending on the application. GFZ is delivering orbit prediction products for these purposes for the Low Earth Orbiters (LEOs) GRACE-A and -B, TerraSAR-X and TanDEM-X. In the past we did this as well for ERS-1, ERS-2, METEOR-3, MIR, GFZ-1, and CHAMP. The orbit predictions highly contribute to the success of these missions. E.g. SLR observations play an important role in Precise Orbit Determination (POD), predicted orbits (naturally not the most precise ones but readily available in real-time) are needed for reduction of space-borne accelerometer data, and orbit predictions are input for scheduling downloads of satellite data and commanding of satellite instruments.
The most demanding application of the orbit predictions is the steering of the laser tracking ground stations of the International Laser Ranging Service (ILRS). For the acquisition of SLR data the required accuracy for LEOs is about 70 m in along-track direction, equivalent to a 10-ms bias of the time the satellite becomes visible over a station (i.e. the satellite is too early or too late), shortly called time bias. The accuracy of the predicted orbits is continuously being monitored. The predicted orbits are compared to Rapid Science Orbits (RSO) that act as highly accurate (a few centimetres) reference orbits.
Operational RSO and NRT orbit determination
Processing of the GNSS radio occultation data within the GNSS Atmosphere Sounding Project (ATMO) requires availability of the precise orbits of the GPS and Low Earth Orbiting (LEO) satellites.
The application of the radio occultation products for the operational Weather Prediction Services requires additionally generation of the satellites orbits with very low latency.
To fulfill the above requirements GFZ has developed and operates two orbit determination systems.
The first one, the so called Rapid Science Orbit (RSO) determination system produces precise orbits with 1 day delay which are used for off-line validation and gap-less generation of the radio occultation products (vertical profiles of bending angles, temperature and humidity) .
The second one, the Near-Real Time (NRT) orbit determination system generates the orbits with a frequency of one satellite revolution (approximately every 1.5 hours) and latency of 15-30 min which are prerequisite for operational generation of the radio occultation products in Near-Real Time.
Currently the NRT and the RSO processing systems deliver orbits for all GPS satellites and for the LEO satellites CHAMP, GRACE A/B, SAC-C, COSMIC 1-6, TerraSAR-X and TanDEM-X. The orbits are stored in the GFZ Information System and Data Center (ISDC) and are freely available for the scientific community world-wide.
Rapid Science Orbits
The Rapid Science Orbit system was developed first in 2001 for the CHAMP mission to generate orbits on a daily basis and to enable processing of the radio occultation data collected by the CHAMP on-board receiver (see GPS radio occultation with CHAMP).
The RSO system generates the satellite orbits from GPS data using the GFZ's “Earth Parameter and Orbit System – Orbit Computation” (EPOS-OC) software in the so-called two-step approach.
In the first step the GPS orbits and clock biases are estimated using a globally distributed network of ground stations. In the second step, the estimated GPS orbits and clocks are used as fixed in the subsequent estimation of the orbits of the Low Earth Orbiting (LEO) satellites.
The LEO orbits generated by the RSO system are validated by independent Satellite Laser Ranging (SLR) observations and obey an accuracy of approximately 5 cm.
The RSO system was extended by the SAC-C satellite in 2003, the GRACE A/B satellites in 2004 to enable processing of the occultation data from these satellites (GRACE RO), the COSMIC 1-6 satellites (2006) (COSMIC-RO), TerraSAR-X in 2007 (TerraSAR-X RO) and TanDEM-X in 2010 (TanDEM-X RO).
The RSO system can easily be extended by other satellite missions. The continuous availability of the orbits is accured by human interaction/repair has to performed if the orbits can not be computed automatically due to data or quality problems.
Near-Real Time orbits
To enable assimilation of the satellite radio occultation products in the Weather Prediction Systems, a Near-Real Time orbit determination system for CHAMP and GRACE was developed and became operational in June 2006.
The NRT processing system, similarly to RSO, is also using the two-step approach for the LEO orbit determination.
The frequency of the NRT orbits, in contrast to RSO, is determined by the frequency of the LEO data 'dumps' (downloads) at S-band receiving staions. F.i. by employing our station in Ny Alesund dumps arrive approximately once per satellite revolution. Once a new portion of data is available, the NRT system generates a new orbit. The latency of these orbits is very low and amounts to 15-30 minutes after the last epoch of the data used in the processing. The GPS NRT orbits, needed for the two step approach, are generated every 15 minutes with a latency of 10 minutes to be available at any time of the LEO dump.
The NRT system contains three subsystems with different sources of the GPS orbits (estimated in-house from ground data or retrieved from the International GNSS Service) what increases redundancy and reliability of the orbit products.
The system was used to generate CHAMP orbits till the very end of the mission in October 2010, for SAC-C satellite it was activated for validation purpose in a period November 2010 - August 2011.
For the GRACE-A satelite the NRT orbits are continuously generated since August 2006.
The NRT system for TerraSAR-X was activated in August 2007 (see also TerraSAR-X RO), for TanDEM-X (TanDEM-X RO) on 24 June 2010, 3 days after the launch of the satellite, what demonstrates the ability of the system to rapidly include new satellites in to the processing chain.
The accuracy of the NRT orbits depends on the NRT subsystem and is in the range of 5-10 cm obtained from the SLR validation. The system is fully automatic, needs offline and postfact human monitoring and maintenance.
Precise orbit determination for radar altimetry satellites
Satellite radar altimetry is one of the primary techniques to study sea level changes. It allows measuring absolute sea level heights and variations globally at various time scales. Precise orbits of altimetry satellites are also a prerequisite for the analysis of altimetry measurements, altimetry mission cross-calibration and generation of a mean sea surface model. The list of the major altimetry missions includes past missions GEOSAT (1985-1990), ERS-1 (1991-2000), TOPEX/Poseidon (1992-2005), ERS-2 (1995-2011), GFO (1998-2008), and Envisat (2002-2012), missions Jason-1 (-2013), and current Jason-2 (since 2008), CryoSat-2 (since 2010), HY-2A (since 2011), and Saral (since 2013), JASON-3 (since 2016) and Sentinel-3A (since 2016).
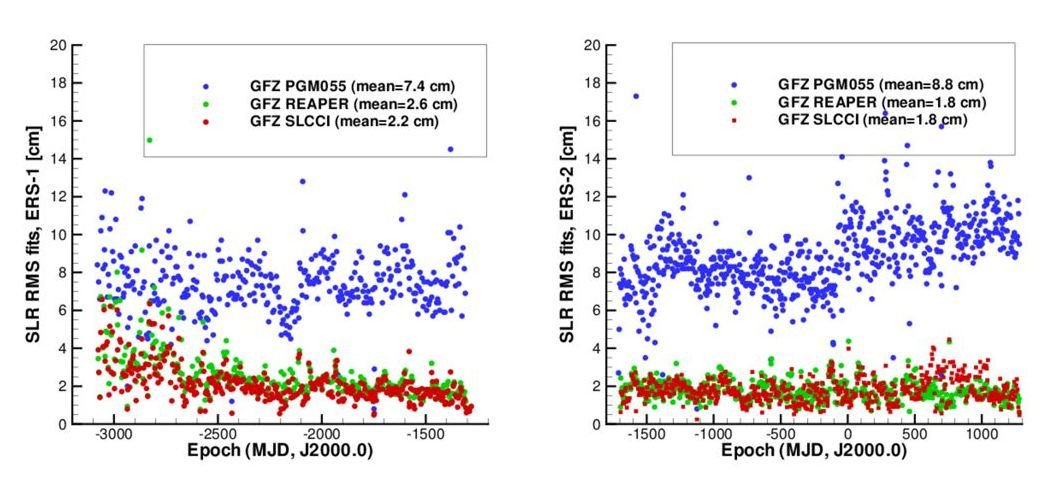
Orbits of altimetry satellites were computed at various institutes using different models in different reference frames in the past. To achieve consistency over longer time periods and reduce systematic effects caused by using different, for different satellites, models and reference frames, the unification of orbit quality is very important. Altimetry satellite precise orbit reprocessing has been performed at GFZ a few times in the past decades using our “Earth Parameter and Orbit System – Orbit Computation” (EPOS-OC) software for various missions within f.i. the following projects: ERS-1 and ERS-2 routine orbit calculation for the European Space Agency (ESA), SEAVAR (2005-2008), REAPER (2009-2010) and SLCCI (2010-2013). Notable progress in precise orbit determination for radar altimetry satellites has been achieved at GFZ in the recent decades. Thus, the root mean square (RMS) fits of Satellite Laser Ranging (SLR) measurements for ERS-1 orbits covering the time span from 1991 till 1996 show an improvement (see Figure, left) from 7.4 cm to 2.2 cm. The improvements of SLR data fits for ERS-2 orbits for the time interval from 1995 till 2003 are even larger (see Figure, right): from 8.8 cm to 1.8 cm.
However, further improvements of the altimetry satellites orbit quality are still desirable and possible. One still open question are about 0.1-0.2 mm/yr differences in the global mean sea level derived from the analysis of ascending and descending tracks of ERS-1, ERS-2 and Envisat orbits computed in the SLCCI project. Additionally, computation of precise orbits of new altimetry missions, such as Cryosat-2, HY-2A, Saral, Sentinel-3 and JASON-3 is expected to contribute significantly to the cross-calibration of altimetry missions and thus to improved altimetry products. Future altimetry missions such as Sentinel-3B planned for 2018, Jason-CS planned for 2020 and Swot to be launched in 2021, together with the current missions will allow long-term study of sea surface heights, global and regional sea level changes and other altimetry investigations. Precise orbits of these missions are an important prerequisite for this research.
“Earth Parameter and Orbit System” Software EPOS
The nucleus for Earth parameter estimation and orbit determination is our EPOS software system, a collection of tools around the core module “OC” (Orbit Computation). EPOS comprises modules for data pre-processing, orbit integration, orbit improvement, orbit predictions, orbit analysis, normal equation handling and solution, and simulation of observations. The EPOS software package is used for operational Precise Orbit Determination (POD) for various past, present and future satellite missions such as Meteor-3, Mir, Space Shuttle, GFZ-1, ERS-1/2, LAGEOS-1/2, CHAMP, GRACE-1/-2, GOCE, GRACE-FO, SWARM, TerraSAR-X, TanDEM-X, GEOSAT, TOPEX, GFO, ENVISAT, Jason-1/-2, Sentinel-3A/3B, GPS, Galileo etc. exploiting SLR, GNSS, DORIS, radar altimeter, PRARE, GRACE K-Band-Ranging, accelerometer, gradiometer, star camera etc. observation data.
Additionally, different pre-CHAMP GRIM (GRgs and geodetic Institute Munich model) and CHAMP, GRACE and GOCE based EIGEN (European Improved Gravity field of the Earth by New techniques) gravity field solutions have been computed during the past 4 decades (for details see Topic 1 and Topic 2).
The satellite orbits and Earth’s gravity field models are calculated with the so called “classical or dynamic approach” based on the analysis of orbit perturbations from artificial Earth satellites. Based on the numerical integration of the equations of motion, the dynamic approach allows for the solution of various system parameters of the Earth, provided a sensitivity of the observation material is given. By the dynamic method, an optimal approximation of the satellite’s trajectory at the level of observational accuracies can be achieved and the method can be adapted to virtually any observation type of satellite geodesy. Since the orbit dynamics are modeled, the dynamic approach is ideally suited for the exploitation of tracking data distributed irregularly in space and time.
EPOS is written in FORTRAN90 and consists of more then 100,000 lines of code. The load module runs on different UNIX workstations and LINUX clusters, as well as on various other platforms. EPOS-OC has been installed also out of house at the University of Rome “La Sapienza” for the project VESTA (“Validation/Evaluation of SLR Tests and Applications in fundamental physics” see "Testing GR Principles") and at the Technical University of Berlin for the project GAGNOS (“GNSS Applications in Geophysical Networks – from the Observation to the Solution”) on the basis of mutual agreements between the universities and GFZ.
ILRS Activities
Since 2003 we are operating a qualified Analysis Center (AC) of the International Laser Ranging Service (ILRS). As such we participate in all activities and pilot projects of the ILRS Analysis Working Group. We routinely analyze LAGEOS-1 and -2 Satellite Laser Ranging (SLR) data for the generation of official daily and weekly products which include loosely constrained station position estimates and Earth Orientation Parameters (EOPs) which are input to the ILRS combined solution. The daily combinations serve mainly EOP prediction needs of the International Earth Rotation and reference systems Service (IERS). From time to time on request by IERS the long-term SLR time series are reprocessed for the development of new International Terrestrial Reference Frames (ITRFs).
The figure shows an actual analysis of the daily products of all the ILRS ACs where the difference of the coordinates of the contributing input solutions versus the combined solution is displayed over 30 days. Our solution, named "gfz", is presented in blue.
Testing General Relativity Principles
The precession of the orbital node of a particle orbiting a rotating mass is known as Lense-Thirring effect (LTE) and is a manifestation of the general relativistic phenomenon of dragging of inertial frames or frame-dragging. The LTE has been measured by using the node drifts of the LAGEOS satellites and GRACE-based Earth gravity field models with an accuracy of about 10% in the recent years. With the LARES experiment launched in 2012 an improvement down to a few percent is anticipated.
A new in-house LAGEOS analysis incorporating a suite of recent gravity field models confirms the 10% level. An example graphical representation of the combination of LAGEOS and LAGEOS-2 data over the years 2000-2016 based on the EIGEN-GRACE03S gravity field is given here. The green line shows the LTE node drift, a regression reveals 46.6 mas/a (milliarcseconds per year) versus a theoretical value of 48.2 mas/a, so a deviation from the prediction by 3%. The red dots show the observed node differences every seven days, eventually being accumulated to yield the green line.
We also investigated the potential of GALILEO to contribute in testing the LTE. It turned out that the solar radiation pressure effects will most likely hide the LTE, however with some proper knowledge of the satellite surface properties and by averaging over the full constellation and by a proper tuning of the POD there remains a chance though. So we will keep up our interest into this for the GALILEO operational phase.

Literature
Ciufolini, I., Paolozzi, A., Pavlis, E., Koenig, R., Ries, J., Gurzadyan, V., Matzner, R., Penrose, R., Sindoni, G., Paris, C., Khachatryan, H., Mirzoyan, S. (2016): A Test of General Relativity using the LARES and LAGEOS Satellites and a GRACE Earth's Gravity Model. European Physical Journal C, 76:120
Rudenko, S., Dettmering, D., Esselborn, S., Fagiolini, E., Schoene, T. (2016): Impact of Atmospheric and Oceanic De-aliasing Level-1B (AOD1B) products on precise orbits of altimetry satellites and altimetry results. Geophysical Journal International, 204, 3, p. 1695-1702, doi.org/10.1093/gji/ggv545
Schuh, H., Koenig, R., Ampatzidis, D., Glaser, S., Flechtner, F., Heinkelmann, R., Nilsson, T.J. (2016 online): GGOS-SIM - Simulation of the Reference Frame for the Global Geodetic Observing System. International Association of Geodesy Symposia, Symposium 2014 on Reference Frames for Applications in Geosciences, Luxembourg, Springer, doi:10.1007/1345_2015_217
Jaeggi, A., Montenbruck, O., Moon, Y., Wermuth, M., Koenig, R., Michalak, G., Bock, H., Bodenmann, D. (2012): Inter-agency comparison of TanDEM-X baseline solutions. Advances in Space Research, doi: 10.1016/j.asr.2012.03.027
Zhu, S., Reigber, Ch., Koenig, R. (2004): Integrated Adjustment of CHAMP, GRACE, and GPS Data. Journal of Geodesy, Vol. 78, No. 1-2, pp. 103-108
"Sea Level Variations – Prospects from the Past to the Present” (SEAVAR) project orbits
One of the major efforts in altimetry satellite orbit reprocessing made in 2005-2008 was the determination of precise orbits of four altimetry satellites, namely, GEOSAT (1985-1989), ERS-1 (1991-1996), TOPEX/Poseidon (1992-2005) and ERS-2 (1995-2006) at the given time spans performed at the German Research Centre for Geosciences (GFZ) within the SEAVAR project using “Earth Parameter and Orbit System – Orbit Computation” (EPOS-OC) software and the Altimeter Database and processing System (ADS) developed at GFZ. The orbits were computed in the same (ITRF2000) reference frame for all satellites using common, most precise, at that time, models and standards available, such as EIGEN-GRACE04S geopotential, FES2004 ocean tide and other models as well as improved, denser, satellite dependent parameterization. GEOSAT orbits were derived using Doppler and single crossover data. ERS-1 and ERS-2 orbits were based on the use of Satellite Laser Ranging (SLR) and single crossover data, while TOPEX/Poseidon orbits were computed using SLR and Doppler Orbitography Integrated by Satellite (DORIS) observations. These orbits called “SEAVAR orbits” show improved quality, as compared to earlier GFZ and other orbits. Thus, use of improved standards and denser parameterization of atmosphere drag coefficients and empirical accelerations, especially in the period of high solar activity, resulted in improved (reduced) values of RMS crossover differences for GFZ EIGEN-GRACE04S orbits of GEOSAT, as compared to NASA JGM-3 orbits of this satellite (see Figure).
The orbit files are available via anonymous ftp at
ftp://ftp.gfz-potsdam.de/home/kg/orbit/SEAVAR/.
The description of these orbits is given in the following paper.
Rudenko, S., Schoene T., Gendt, G., Zhang F., and Thaller D., 2007. Precise orbits of altimetry satellites and analysis of GPS data at tide gauges for sea level research. Observations of the System Earth from Space: status seminar, 22 - 23 November 2007, Bavarian Academy of Sciences and Humanities, Munich; Programme & Abstracts, Koordinierungsbuero GEOTECHNOLOGIEN, 41-46.
, as compared to NASA JGM-3 orbit (1997) of this satellite")
Reprocessing of Altimeter Products for ERS (REAPER): consistent reprocessing of ERS orbits
The European Space Agency (ESA) Remote Sensing Satellites ERS-1 (launched in July 1991 and operated until March 2000) and ERS-2 (launched in April 1995 and operated until July 2011) are used besides remote sensing also for altimetry applications. However, the existing ERS altimetry data available from ESA are not homogeneous due to the changes in processing and algorithms made during the long mission lifetimes. To reprocess all existing ERS-1 and ERS-2 Radar Altimetry (RA) and Microwave Radiometer data for 12-year time period from July 1991 till June 2003, when ERS-2 on-board tape recorder stopped working, and to produce a coherent and homogeneous long-term series of altimetry products that is cross calibrated and offers continuity with other RA missions are the purposes of the international project „Reprocessing of Altimeter Products for ERS“ (REAPER) executed with the participation of scientists from Mullard Space Science Laboratory (MSSL, United Kingdom), Collecte Localisation Satellites (CLS, France), IsardSAT (Spain), ESA European Space Operations Centre (ESOC) Navigation Support Office (Germany), Delft Institute of Earth Observation and Space Systems (DEOS) at Delft University of Technology (the Netherlands), Altimetrics LLC (USA) and Helmholtz Centre Potsdam GFZ German Research Centre for Geosciences (Germany).
An important part of the project was the consistent reprocessing of ERS orbits to provide the best possible homogeneous orbit solution making use of almost 20 years of advances in satellite orbit modeling. The further improvement of ERS-1 and ERS-2 orbits was achieved in 2009-2010 within this project. The orbits were derived by three orbit groups, namely, DEOS, ESOC, and GFZ ones. The orbit validation and evaluation was performed by Altimetrics LLC. The same standards and models were used for ERS-1 and ERS-2, as those for Envisat and to lesser extent for Jason-1/2 allowing homogeneous analysis with these altimetry missions. However, each orbit group used separate orbit determination software, different parameterization and its own experience in altimetry satellite orbit determination allowing an independent control and inter-comparison of three orbit solutions and also the creation of a combined one. New improved models, such as the EIGEN-GL04S time varying gravity field model, the IAU2000A precession-nutation model (IERS Conventions, 2003), the Mendes-Pavlis model for troposphere correction following the IERS 2003 update, the Lenze-Thirring and De Sitter (geodetic precession) effects and some other models were used. The orbits were derived in the ITRF2005 reference frame. The new consistent precise orbit solutions for ERS-1 and ERS-2 derived in the REAPER project are available via anonymous ftp at ftp://dgn6.esoc.esa.int/reaper/. The combined orbit solutions show the best quality among four solutions and indicate significant improvement in the orbit accuracy, as compared to the previous ESA D-PAF orbits of ERS-1 and ERS-2. The improvements in satellite orbits resulted in the improvements of altimetry products, in particular, in the final surface height measurements. A detailed description of these orbits is given in the following paper.
Rudenko, S., Otten, M., Visser, P., Scharroo, R., Schoene, T., Esselborn, S. New improved orbit solutions for the ERS-1 and ERS-2 satellites. Advances in Space Research, 49, 8, 1229-1244, doi:10.1016/j.asr.2012.01.021, 2012.
It is planned to derive in 2013 ERS-2 orbits also for the time interval from July 2003 until the end of the mission in July 2011 using the same models, as those used in the REAPER project.
Sea Level Climate Change Initiative (SLCCI) project orbits
Homogeneous, precise orbits of altimetry satellites derived in the same reference frame using consistent precise background models and standards are very important to avoid possible inconsistencies in the derived sea level products caused by using different reference frames and models.
Therefore, new precise orbits of Envisat (Environmental Satellite, from April 2002 to December 2010), European Remote Sensing Satellites ERS-1 (from August 1991 till July 1996), ERS-2 (from May 1995 till July 2003) and TOPEX/Poseidon (from September 1992 till October 2005) have been computed at GFZ in the same terrestrial reference frame (ITRF2008) for all satellites using consistent models based mainly on the IERS Conventions (2010) within the Sea Level project of the European Space Agency (ESA) Climate Change Initiative (http://www.esa-sealevel-cci.org/). Three versions of orbits were generated for each satellite using three different Earth gravity field models – time-variable EIGEN-GL04S and EIGEN-6S and static EIGEN-6S ones.
The orbits are computed using the Earth Parameter and Orbit System - Orbit Computation (EPOS-OC) software for precise orbit determination and the Altimeter Database and processing System (ADS) both developed at GFZ for altimetry crossover data computation and altimetry analysis of the orbits. Satellite Laser Ranging (SLR) and altimeter crossover data were used for ERS-1, additionally Precise Range And Range-rate Equipment (PRARE) measurements were utilized for ERS-2 and SLR and Doppler Orbitography and Radiopositioning Integrated by Satellite (DORIS) observations were applied for Envisat and TOPEX/Poseidon.
The SLCCI orbits are available via ftp at
ftp://ftp.gfz-potsdam.de/pub/home/kg/orbit/SLCCI.
GFZ SLCCI orbits show improved orbit quality, as compared to previous GFZ orbit solutions. For example, ERS-1 and ERS-2 SLCCI orbits give 2.3 and 2.8 mm smaller RMS of crossover differences than GFZ REAPER orbits. The mean value of SLR RMS fits is 1.28 cm for Envisat CCI11 orbit derived using the time-variable EIGEN-6S geopotential model (see Figure). New orbits of Jason-1 and Jason-2 are also computed within this project. More information on the SLCCI orbits can be found in the following presentation.
Rudenko, S., Esselborn, S. and Schoene, T. New orbits of ERS-1, ERS-2, Envisat and TOPEX/Poseidon in the ITRF2008 reference frame and their use for mean sea level research. Presentation given at the Symposium "20 Years of Progress in Radar Altimetry", Venice-Lido, Italy, 24-29 September 2012.
: CCI07 orbit computed using EIGEN-GL04S geopotential model, CCC11 orbit derived using time-variable EIGEN-6S_correct model and CCI12 orbit calculated using static EIGEN-6S geopo...")
