

EeteS - the EnMAP end-to-end Simulation Tool
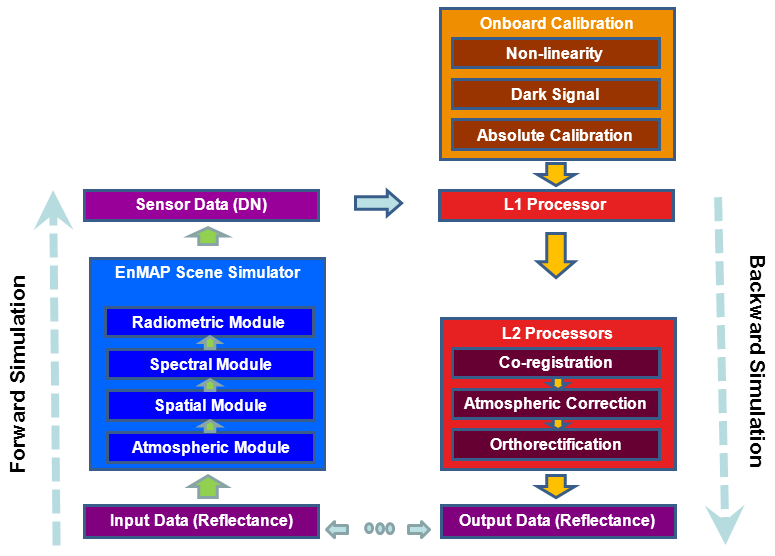
An end-to-end simulation tool is an important prerequisite for the design of any new Earth imaging system. Optimization of sensors requires understanding the effects of instrumental and environmental parameters on the resulting image characteristics, which can be achieved through precise simulation of sensor images. For this purpose, EeteS has been developed within the framework of the Environmental Mapping and Analysis Program (EnMAP) mission at the Deutsches GeoForschungsZentrum GFZ, Germany. The software follows the forward and backward processing schemes, including sensor scene simulation, data calibration and data pre-processing. The different stages of the EeteS processing chain are depicted in the flowchart in Fig. 1. They comprise the EnMAP scene simulator and its inversion process which are briefly described in the following.
A. EnMAP scene simulator
The first part of the end-to-end simulation process is the generation of DN data by the EnMAP scene simulator. Reflectance data and a digital elevation model (DEM) serve as input. These data are spectrally and spatially oversampled with respect to the EnMAP final spectral and spatial sampling interval. The EnMAP scene simulator is implemented in a modular and flexible way consisting of four processing units:
1) The Atmospheric module converts from surface reflectance to TOA radiance data using horizontal distributions of aerosol optical thickness, pixel-wise columnar water vapor and surface elevation and includes optional cloud covers and shadow.
2) The Spatial module simulates the spatial recording produced by the sensor using a geometry model characterized by the definition of the pointing vector for each detector element and an optical-sensor model defined by the sensors modulation transfer function (MTF). The module enables the simulation of various spatial aberrations caused by, e.g., the telescope optics, the double slit and the curved prisms.
3) The Spectral module performs the spectral resampling, taking into account the spectral response functions in 244 bands, non-uniformities in the spectral domain such as smile, and an optional spectrometer shift in the spectral dimension.
4) The Radiometric module transforms the at-sensor radiance using parameters such as the integration time; quantum efficiency; read, shot, dark, ADC and quantization noises; IR-Background signal; high and low gain modes for the VNIR detector; variable offsets and gains; and individual non-linear responses for each detector element.
B. Sensor calibration
The full exploitation of the potential of future EnMAP data requires maintenance of a high data quality. To guarantee these high standards, the EnMAP system comprises a number of calibration devices enabling improved radiometric and spectral calibration. At the current stage of the development of EeteS only the Focal Plane Assembly (FPA) LEDs, the Shutter and the absolute radiometric calibration are implemented, forming the basis for the transformation from DN to radiance using the L1 processing chain:
1) Calibration of detector non-linearity using FPA LEDs: Deviation from detector linearity in real systems has to be characterized and corrected in order to avoid errors in radiometric accuracy. Linearity/non-linearity characterization is performed on a regular basis on-board of EnMAP, using dedicated FPA LEDs. During characterization the LEDs provide constant irradiance at the detector arrays. By varying detector integration time up to 40 different radiance levels are simulated. Analysis of the recorded signals allows to assess linearity characteristics of EnMAP and to update the nonlinearity correction tables if necessary. The described EnMAP calibration approach has been implemented in EeteS.
2) Dark signal calibration: In the EnMAP approach the shutter is used to estimate the dark signal by being placed into the instruments optical path, thus blocking all light coming through the slits. The same procedure is implemented in EeteS by simulating the recording of a dark image. The resulting dark signal for each detector element is characterized by the statistical mean of the measured lines.
3) Absolute radiometric calibration: EnMAP follows the classical approach of using the sun as a known reference source. The sun illuminates a diffuser placed in front of the instrument’s aperture that illuminates the field of view (FOV). Precise simulation of this process is a challenging and time consuming task requiring many assumptions. Therefore, a simplified version of the real calibration process is implemented at the current stage of EeteS development. It is assumed that diffuse reflectance is generated by the diffuser that simultaneously illuminates the FOV with uniform flux, generating comparable detector readouts for each spatial pixel on a particular spectral row. The solar radiance is modeled by the new Kurucz solar irradiance spectrum that is also used in the atmospheric module.
C. Image pre-processing
Using the calibration parameters determined by the simulated onboard calibration devices, in the next step the raw DN data generated by the EnMAP Scene Simulator are transform into TOA radiance and subsequently to orthorectified surface reflectance data. The implementation of this process in EeteS consists of four main steps which are depicted in Fig. 1. They comprise the L1 processor and the L2-processor including spatial co-registration of the two EnMAP spectrometers, atmospheric correction (L2atm) and orthorectification (L2geo) modules:
1) From DN to TOA radiance - the L1-processor: The L1 processor converts the L0 data to physical at-sensor radiance values utilizing the estimated calibration parameters. The sequences starts with the non-linearity correction, followed by the dark current subtraction and the multiplication of gain coefficients.
2) Spatial Co-registration: In case of the EnMAP sensor the projections of the two slits onto the ground lead to two separate scanlines for the VNIR and SWIR detectors, respectively. However, subsequent pre-processing (e.g. atmospheric correction) and data analysis require spectral information characterized by a perfect spatial match between the two wavelength ranges. Thus, the SWIR scan lines are shifted relative to the VNIR lines.
3) From TOA radiance to surface reflectance - the L2atm processor: Surface reflectance maps are derived from the input at-sensor radiance data considering also the spectral smile of each detector element. Columnar water vapor (CWV) maps and aerosol optical thickness (AOT) are automatically estimated from the radiance data and subsequently used to constrain the radiative transfer calculations needed for the inversion of radiance to reflectance.
4) Ortho-rectification - the L2geo processor: A standard parametric orthorectification is applied separately to both detector images utilizing the pointing characteristics of each detector element and the position of the sensor and a DEM. Different standard resampling strategies, such as nearest neighbor, bilinear or cubic convolution, are available in the L2geo module and enable very accurate pixel alignment between the bands.
In the result EeteS is capable of simulating EnMAP-like raw image scenes (L0) and image products (L1 and L2) taking into account a variety of instrumental and environmental configurations. The simulation output - synthetic EnMAP data - will serve as a test bench for pre-launch development and validation of algorithms optimized for analyzing future EnMAP data.
