


Erdsystemparameter und Bahndynamik
Leiter: Prof. Frank Flechtner
Typische Erdsystemparameter sind Parameter, die die geometrische und dynamische Figur der Erde beschreiben (Koordinaten von Bodenstationen oder sphärisch harmonische Koeffizienten des Schwerefelds) und ihre Orientierung im Raum (Erdorientierungsparameter). Wir schätzen diese Erdsystemparameter durch Beobachtung der Dynamik von Satellitenbahnen. Die Bahndynamik vermessen wir mit „Satellite Laser Ranging“ (SLR), „Global Navigation Satellite System“ (GNSS), „Doppler Orbitography and Radiopositioning Integrated by Satellite“ (DORIS) und anderen Techniken. Die Dynamik von Satellitenbahnen wird bestimmt durch konservative (Schwerefeld) und nichtkonservative (Widerstand der Hochatmosphäre, Strahlungsdruck, etc.) Kräfte. Alle Kräfte sind in unserem zentralen „Earth Parameter and Orbit System” Software-Paket EPOS modelliert und parametrisiert. Durch Auswertung der Beobachtungen in EPOS im Sinne der Methode der kleinsten Quadrate können wir die uns interessierenden Parameter mit höchster Genauigkeit berechnen und erhalten gleichzeitig hochgenaue Bahnen.
Dafür
- erhalten und entwickeln wir Wissen im Bereich Satellitenbahndynamik
- pflegen und entwickeln wir unser anspruchsvolles Software-Paket EPOS
- integrieren wir eine Vielfalt von terrestrischen und raumgestützten Beobachtungstypen und Weltraummissionen in unsere Lösungen
- lösen wir auf nach Orientierung, Lage des Mittelpunkts und Figur der Erde
- teilen wir unsere Entdeckungen und nehmen aktiv teil an den IAG-Diensten „International Earth Rotation and Reference Systems Service“ (IERS), „International Laser Ranging Service“ (ILRS), „International DORIS Service“ (IDS) und „International GNSS Service“ (IGS)
- beschäftigen wir uns mit Fundamentalphysik in internationalen Kooperationen zum Test der allgemeinen Relativitätstheorie
Deshalb lauten die wichtigsten Projekte:
- Entwicklung und Pflege des Software-Pakets EPOS
- Betrieb eines Analysezentrums des ILRS (ILRS AC)
- Betrieb eines assoziierten Analysezentrums des IDS
- Betrieb der Potsdamer SLR-Station
- Präzise Bahnbestimmung für geodätische Satelliten- und Altimetriemissionen
- Operationelle Bahnbestimmung („Rapid Science Orbits” (RSO) und „Near Real-Time orbits“ (NRT)) für die Auswertung von GNSS-Radiookkultationen
- Operationelle Bestimmung präziser Basislinien für die TanDEM-X-Mission
- Test von Prinzipien der allgemeinen Relativitätstheorie
Operationelle Bestimmung von RSO und NRT Orbits
Zur Prozessierung von GNSS Radio-Okkultationsdaten im GNSS Atmospheric Sounding Project (ATMO) sind präzise Bahnen der GPS-Satelliten und der tief fliegenden Empfänger (Low Earth Orbiting, LEO) notwendig. Die Nutzung der Radio-Okkultationsprodukte für die operationelle Wettervorhersage machte es darüber hinaus notwendig, solche Satellitenbahen mit einer Latenzzeit zur Verfügung zu stellen, die so klein wie möglich ist. Am GFZ wurden zwei Systeme zur Orbit-Bestimmung entwickelt, die diesen Anforderungen genügen, und diese werden bis heute betrieben. Das erste, das System zur Bestimmung des so genannten Rapid Science Orbit (RSO), erzeugt präzise Satellitenbahnen mit einem Tag Verzug. Diese werden für Validationen genutzt, die nicht in Echtzeit laufen, und zur Erzeugung des lückenlosen Radio-Okkultations-Produktes (vertikale Profile von Strahlkrümmungs-Winkeln, Temperatur und Luftfeuchtigkeit). Das zweite System zur Bestimmung von Bahnen in nahezu Echtzeit, Near-Real Time (NRT), erzeugt neue Orbits bei jedem Erdumlauf (also etwa alle 1.5 Stunden) mit einer Zeitverzögerung vom 15-30 Minuten. Diese sind erforderlich für die operationelle Bereitstellung von quasi verzögerungsfreien Radio-Okkultationsprodukten. Die Prozessierungs-Systeme NRT und RSO können gegenwärtig Bahnen für alle GPS-Satelliten erzeugen. Dazu kommen die LEO-Satelliten CHAMP, GRACE A/B, SAC-C, COSMIC 1-6, TerraSAR-X und TanDEM-X. Diese Produkte werden im GFZ Information System and Data Center (ISDC) gespeichert und sind darüber hinaus weltweit allen wissenschaftlichen Anwendern zugänglich.
Rapid Science Orbits
Das System Rapid Science Orbit wurde zunächst im Jahre 2001 für den CHAMP-Satelliten entwickelt. Es diente der Bereitstellung von Orbits im täglichen Rhytmus, und erlaubte die Prozessierung von Radiookkultations-Daten die vom Bordempfänger von CHAMP gesammelt wurden (siehe GPS Radio-Okkultationssystem mit CHAMP). Das RSO-System erzeugt die Satelliten-Orbits aus GPS Daten, wobei die GFZ-eigene Software "Earth Parameter and Orbit System - Orbit Computation" (EPOS-OC) im so genannten "Zwei-Schritt-Verfahren" zum Einsatz kommt. Bei letzterem Verfahren werden, im ersten Schritt, durch Nutzung eines über den ganzen Globus verteilten Netzes von Bodenstationen, GPS-Orbits und Uhrenparameter geschätzt. Im zweiten Schritt fliessen die so gewonnenen GPS-Orbits und Uhren als feste Grössen in eine nachfolgende Ausgleichung von Low Earth Orbiting (LEO) Satelliten ein. Die vom RSO produzierten LEO-Orbits werden durch unabhängige Laser-Entfernungsmessungen (Satellite Laser Ranging, SLR) validiert und habe eine Genauigkeit von ungefähr 5 cm. Das RSO-System wurde im Jahre 2003 um den Satelliten SAC-C erweitert. Danach folgten im Jahre 2004 GRACE-A und GRACE-B um die Prozessierung von Radio-Okkultations-Daten dieser Satelliten zu ermöglichen (GRACE-RO). Dazu kamen dann COSMIC 1-6 im Jahre 2006 (COSMIC-RO), TerraSAR-X im Jahre 2007 (TerraSAR-X RO) und TanDEM-X im Jahre 2010 (TanDEM-X RO). Das RSO-System kann auf einfache Weise für weitere Satellitenmissionen erweitert werden. Um die ununterbrochene Verfügbarkeit von Orbit-Daten zu garantieren, sind zeitweise Eingriffe und Reparaturen "von Hand" notwendig, wenn die Satellitenbahnen, etwa im Falle Datenproblemen oder Qualitätsmängeln, nicht automatisch gerechnet werden können.
Satellitenbahnen in nahezu Echtzeit (Near-Real Time orbits)
Um die Assimilation von Radio-Okkultationsprodukten in den Prozess der Wettervorhersage zu ermöglichen, wurde ein System zur Satelliten-Bahnbestimmung in nahezu Echtzeit für CHAMP und GRACE entwickelt. Im Rahmen des NRT-RO Projektes im BMBF-Programm GEOTECHNOLOGIEN wurde dieses im Juni 2006 operationell. Genau wie bei RSO kommt im NRT-System zur Bestimmung der LEO-Satellitenbahnen das Zwei-Schritt-Verfahren zum Einsatz. Im Unterschied zur Situation beim RSO hängt die Häufigkeit, mit der die NRT-Orbits berechnet werden müssen davon ab, wie oft der Satellit Messdaten zu den Bodenstationen überträgt.
Dieses geschieht etwa einmal pro Umlauf. Sobald der neue Datensatz verfügbar ist, erzeugt das NRT-System einen neuen Orbit. Die Latenz-Zeit dieser Orbits ist sehr klein; sie beträgt etwa 15-30 Minuten, gemessen von der Epoche des letzten Datensatzes, der in die Prozessierung der jeweiligen Bahn einfliesst. Die für das Zweischritt-Verfahren ebenfalls benötigten NRT-Bahnen der GPS-Satelliten werden - davon unabhängig - alle
15 Minuten mit einer Latenz-Zeit von 10 Minuten erzeugt, um bei einem Herunterladen von LEO-Daten jederzeit verfügbar zu sein. Das NRT-System beinhaltet drei Teilsysteme, die sich dadurch unterscheiden, woher man die GPS-Bahnen bekommt
(also entweder im Hause aus Bodendaten gerechnete, als auch bereits fertige, die der Internationale GNSS-Service bereitstellt). Diese Mehrgleisigkeit erhöht die Redundanz und Verlässlichkeit der Orbit-Produkte. Das System lieferte CHAMP-Orbits bis umittelbar zum Ende dieser Mission im Oktober 2010. Für den SAC-C Satelliten wurde es zum Zwecke der Validierung im Zeitraum von November 2010 bis August 2011 aktiv.
Seit August 2006 generiert es in ununterbrochener Folge NRT-Orbits für den Satelliten GRACE-A. Das NRT-System für TerraSAR-X wurde im August 2007 aktiv gemacht (siehe auch TerraSAR-X RO), und für TanDEM-X (TanDEM-X RO) am 24. Juni 2010, drei Tage nach dessen Start. Dies zeigt übrigens, wie einfach ein neuer Satellit in die Prozesskette eingefügt werden kann. Die Genauigkeit der NRT-Orbits hängt vom jeweiligen NRT-Teilsystem ab, und sie liegt im Bereich vom 5-10 cm,
was durch SLR-Messungen nachgewiesen wurde. Das System ist vollständig automatisiert, muss jedoch vom Menschen überwacht und gepflegt werden.
Präzise Bahnbestimmung für Altimetriemissionen
Die Satelliten-Radaraltimetrie ist eine der wichtigsten Techniken um globale Meeresspiegelschwankungen aus der Beobachtung von Meeresspiegelhöhen auf verschiedenen Zeitskalen abzuleiten. Dazu, aber auch zur Berechnung eines mittleren Meeresspiegels sowie zur gegenseitigen Kalibration verschiedener Altimetriemissionen benötigt man insbesondere die präzisen Bahnen der Altimetriesatelliten. Die wichtigsten Altimetriemissionen der Vergangenheit beinhalten GEOSAT (1985-1990), ERS-1 (1991-2000), TOPEX/Poseidon (1992-2005), ERS-2 (1995-2011), GFO (1998-2008), und Envisat (2002-2012), sowie aktuell Jason-1 (seit 2001), Jason-2 (seit 2008), CryoSat-2 (seit 2010), HY-2A (seit 2011), und Saral (since 2013).
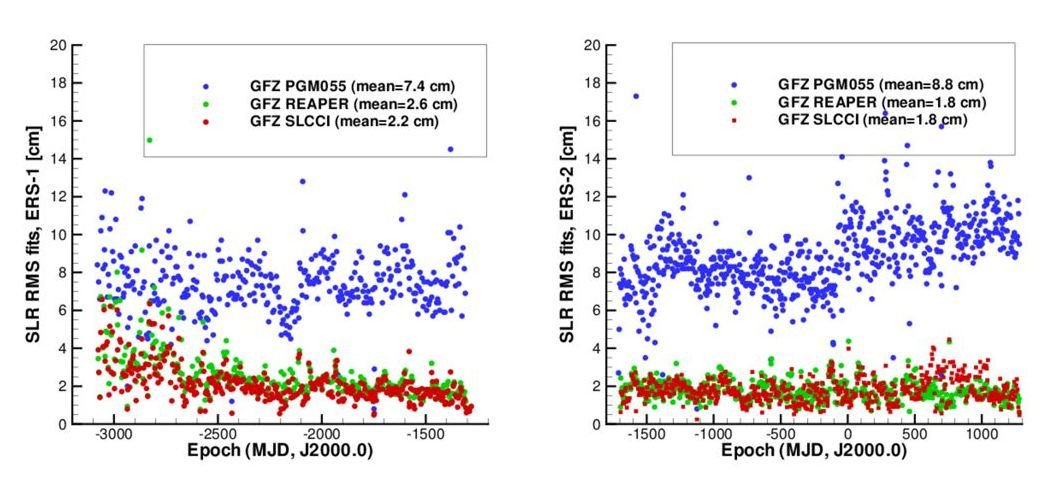
In der Vergangenheit wurden diese Satellitenbahnen an verschiedenen Instituten mit jeweils unterschiedlichen Korrekturmodellen, Prozessierungsstandards und Referenzsystemen berechnet. Um eine Konsistenz der Ergebnisse über längere Zeiträume zu erreichen bzw. systematische Fehler zu vermeiden (und damit zuverlässigere Aussagen zu Meeresspiegelschwankungen zu erhalten), ist die Vereinheitlichung der verwendeten Modelle und Standards sehr wichtig. Am GFZ wurden daher in den letzten Jahren mit Hilfe der "Earth Parameter and Orbit System – Orbit Computation” (EPOS-OC) Software die Bahnen verschiedener Altimetriesatelliten mehrfach konsistent reprozessiert. So wurden bereits 1995 ERS-1 und ERS-2 für die Europäische Weltraumbehörde (ESA) mit sogenannten ERS-Standards im „PGM055“ Referenzrahmen neu prozessiert und danach noch mehrere Male in den SEAVAR- (2005-2008), REAPER- (2009-2010) und SLCCI- (2010-2013) Projekten. In den letzten Jahren kamen Verbesserungen der Genauigkeit dazu. Als Ergebnis der ERS-, REAPER- und SEAVAR-Standards wurde beispielsweise die „root-mean-square- (RMS-)“ Anpassung der Satellite-Laser-Ranging- (SLR-) Beobachtungen an den ERS-1-Orbit für den Zeitraum 1991 bis 1996 kontinuierlich verbessert. Der RMS beträgt 7.4 cm bei Verwendung der ERS Standards (1995, Bild links) und nur noch 2.6 cm bei Verwendung der REAPER- bzw. 2.2 cm bei Nutzung der SLCCI-Standards. Die Verbesserungen für den Zeitraum 1995 bis 2003 sind für ERS-2 sogar noch deutlicher (Bild rechts): 8.8 cm (ERS Standards, 1995) auf 1.8 cm (REAPER und SLCCI Standards).
Wer sich für weitere Hintergründe zu den genannten Projekten und weitere Pläne der Reprozessierung interessiert, ist an dieser Stelle auf die englischen Seiten verwiesen.
“Earth Parameter and Orbit System” Software EPOS
Der Nukleus für die Bestimmung von Erdsystemparametern und von Satellitenbahnen ist unser Software-Paket EPOS, eine Sammlung von Werkzeugen rund um das Kernmodul OC (“Orbit Computation”). EPOS umfasst Module für Datenvorbereitung, Bahnintegration, Bahnverbesserung, Bahnvorhersage, Bahnanalyse, Bearbeitung und Lösung von Normalgleichungen und Simulation von Beobachtungen. EPOS wird zur operationellen präzisen Bahnbestimmung (POD) für viele historische, aktuelle und zukünftige Satellitenmissionen wie Meteor-3, Mir, Space Shuttle, GFZ-1, ERS-1/2, LAGEOS-1/2, CHAMP, GRACE-1/-2, GOCE, GRACE-FO, SWARM, TerraSAR-X, TanDEM-X, GEOSAT, TOPEX, GFO, ENVISAT, Jason-1/-2, Sentinel-3A/-3B, GPS, Galileo etc. eingesetzt, wobei Beobachtungen vom Typ SLR, GNSS, DORIS, Radaraltimeter, PRARE, GRACE K-Band-Ranging, Akzelerometer, Gradiometer, Sternkamera etc. ausgewertet werden.
Mehr noch, verschiedene GRIM- (GRgs and geodetic Institute Munich model) Schwerefeldmodelle aus der Zeit vor CHAMP und EIGEN-Schwerefeldmodelle aus Daten der CHAMP-, GRACE- und GOCE-Missionen sind in den letzten 4 Dekaden mit EPOS gerechnet worden (näheres siehe Topic 1 und Topic 2).
Satellitenbahnen und Schwerefeldmodelle werden mit dem sogenannten klassischen bzw. dynamischen Ansatz berechnet aufgrund der Analyse der Bahnstörungen künstlicher Erdsatelliten. Mittels der numerisch integrierten Bewegungsgleichungen ermöglicht der dynamische Ansatz die Lösung der verschiedensten Erdsystemparameter falls die Beobachtungen darauf sensitiv sind. Mit der dynamischen Methode können Satellitenbahnen gerechnet werden, die in ihren Genauigkeiten denen der beitragenden Beobachtungen entsprechen, dabei können praktisch alle möglichen Beobachtungstypen adaptiert werden. Da die Bahndynamik modelliert wird, kann auch lückenhaftes Beobachtungsmaterial ideal verarbeitet werden.
EPOS-OC ist in FORTRAN90 geschrieben, es besteht aus über 100.000 Zeilen Code. Ausführbare Module laufen auf verschiedenen UNIX Workstations und LINUX-Clustern, und auch auf diversen anderen Plattformen. EPOS-OC wurde auch außer Haus an der Universität Rom “La Sapienza” für das Projekt VESTA (“Validation/Evaluation of SLR Tests and Applications in fundamental physics”, s. "Test der Gesetze der Allgemeinen Relativitätstheorie") und an der Technischen Universität Berlin für das Projekt GAGNOS (“GNSS Applications in Geophysical Networks – from the Observation to the Solution”) installiert aufgrund gegenseitiger Verträge zwischen den Universitäten und dem GFZ.
ILRS Aktivitäten
Seit 2003 betreiben wir ein qualifiziertes Analysezentrum (“Analysis Center“, AC) des „International Laser Ranging Service“ (ILRS). Deshalb nehmen wir an allen Aktivitäten und Pilotprojekten der ILRS „Analysis Working Group“ teil. Routinemäßig analysieren wir LAGEOS-1 and -2 “Satellite Laser Ranging” (SLR) Daten für die Generierung offizieller täglicher und wöchentlicher Produkte, die schwach gefesselte Stationskoordinaten und Erdorientierungsparameter (EOPs) enthalten und in die kombinierten ILRS-Produkte eingehen. Die tägliche Kombination dient hauptsächlich zur Vorhersage von EOPs des „International Earth Rotation and reference systems Service“ (IERS). Von Zeit zu Zeit werden auf Anfrage von IERS lange SLR-Zeiträume reprozessiert für die Entwicklung neuer internationaler Koordinatensysteme, den „International Terrestrial Reference Frames“ (ITRFs).
Die Grafik zeigt eine aktuelle Analyse der täglichen Produkte aller ILRS ACs. Es sind die Differenzen der Koordinaten der beitragenden Lösungen gegen die kombinierte Lösung über die letzten 30 Tage dargestellt. Unsere Lösung, genannt „gfz“, ist blau gezeichnet.
Test der Gesetze der Allgemeinen Relativitätstheorie
Die Präzession des Bahnknotens eines Partikels, das um eine rotierende Masse fliegt, ist als Lense-Thirring-Effekt (LTE) oder „frame-dragging effect“ bekannt. Es handelt sich um die Manifestation des Phänomens der Allgemeinen Relativitätstheorie, dass eine rotierende Masse Raum und Zeit um sich herum wie eine zähe Flüssigkeit mitzieht. Der LTE wurde in neuerer Zeit aus den Knotendriften der LAGEOS-Satelliten mit Hilfe der GRACE-Schwerefelder mit einer Genauigkeit von ca. 10% gemessen. Mit dem LARES-Experiment (der Start des Satelliten erfolgte in 2012) wird eine Verbesserung der Genauigkeit im Prozentbereich angestrebt.
Eine neue hauseigene LAGEOS-Analyse, die einige neue Schwerefeldmodelle einbezieht, bestätigt die Genauigkeit von 10%. Eine Beispielgrafik der Kombination von LAGEOS und LAGEOS-2 über die Jahre 2000-2016 auf Grundlage des Schwerefeldmodells EIGEN-GRACE03S ist hier dargestellt. Die grüne Linie zeigt die LTE-Knotendrift, eine Regressionsanalyse liefert 46.6 mas/a (Millibogensekunden pro Jahr) gegenüber dem theoretischen Wert von 48.2 mas/a, also eine Abweichung gegenüber der Vorhersage von 3%. Die roten Punkte zeigen die beobachteten Knotendifferenzen alle sieben Tage, akkumuliert ergeben sie die grüne Linie.
Wir haben auch das Potenzial von GALILEO für einen LTE-Test untersucht. Tatsächlich wird der solare Strahlungsdruck den LTE überdecken, jedoch bleibt eine Chance offen, wenn die Oberflächeneigenschaften der Satelliten bekannt sind, über die gesamte Konstellation gemittelt wird und die präzise Bahnbestimmung (POD) entsprechend angepasst wird. Wir werden deshalb zukünftig GALILEO über die operationelle Phase hinweg analysieren.

Literatur
Ciufolini, I., Paolozzi, A., Pavlis, E., Koenig, R., Ries, J., Gurzadyan, V., Matzner, R., Penrose, R., Sindoni, G., Paris, C., Khachatryan, H., Mirzoyan, S. (2016): A Test of General Relativity using the LARES and LAGEOS Satellites and a GRACE Earth's Gravity Model. European Physical Journal C, 76:120
Rudenko, S., Dettmering, D., Esselborn, S., Fagiolini, E., Schoene, T. (2016): Impact of Atmospheric and Oceanic De-aliasing Level-1B (AOD1B) products on precise orbits of altimetry satellites and altimetry results. Geophysical Journal International, 204, 3, p. 1695-1702, doi.org/10.1093/gji/ggv545
Schuh, H., Koenig, R., Ampatzidis, D., Glaser, S., Flechtner, F., Heinkelmann, R., Nilsson, T.J. (2016 online): GGOS-SIM - Simulation of the Reference Frame for the Global Geodetic Observing System. International Association of Geodesy Symposia, Symposium 2014 on Reference Frames for Applications in Geosciences, Luxembourg, Springer, doi: 10.1007/1345_2015_217
Jaeggi, A., Montenbruck, O., Moon, Y., Wermuth, M., Koenig, R., Michalak, G., Bock, H., Bodenmann, D. (2012): Inter-agency comparison of TanDEM-X baseline solutions. Advances in Space Research, doi: 10.1016/j.asr.2012.03.027
Zhu, S., Reigber, Ch., Koenig, R. (2004): Integrated Adjustment of CHAMP, GRACE, and GPS Data. Journal of Geodesy, Vol. 78, No. 1-2, pp. 103-108
Abgeschlossene Projekte
SEAVAR
Diese Seite existiert nur in englischer Sprache.
REAPER
Diese Seite existiert nur in englischer Sprache.
SLCCI
Diese Seite existiert nur in englischer Sprache.
Kontakt
