


AMG: Atmosphärenmodell für GNSS
Das Atmosphärenmodell für GNSS (die Komponente, welche die Ausbreitung von Radiosignalen in der Atmosphäre beschreibt) besteht aus einem Teil für die Troposphäre und einem für die Ionosphäre.
Troposphäre: Druck-, Temperatur- und Feuchtefelder stammen von einem globalen Numerischen Wetter Modell (NWM), dem Global Forecast System (GFS) des National Centers for Environmental Prediction (NCEP) (www.ncep.noaa.gov). Wir verwenden einen Ray-tracing-Algorithmus (Zus et al., 2014) und leiten damit stations-spezifische hydrostatische (feuchte) Laufzeitverzögerungen für den Zenith, die Koeffizienten der Mapping-Funktion und die horizontalen Gradienten-Komponenten ab. Für Reanalysen verwenden wir die Analyse des NWM, während wir in Echtzeitanwendungen Kurzfristvorhersagen des NWM verwenden. Zum Einfluss des Modells für die Troposphäre in der GNSS-Datenanalyse siehe Zus et al., 2021.
Ionosphäre: Das Elektronendichtefeld stammt von einem klimatologischen Modell der International Reference Ionosphere (IRI) (http://iri.gsfc.nasa.gov/), und das Erdmagnetfeld basiert auf dem International Geomagnetic Reference Field (IGRF) (http://www.ngdc.noaa.gov/IAGA/vmod/igrf.html). Wir verwenden einen Ray-tracing-Algorithmus und leiten daraus Ionosphärenparameter ab, welche dann für Korrekturen höherer Ordnung in präzisen Anwendungen verwendet werden können (Zus et al., 2017).
Datenverfügbarkeit: Die Troposphären- und Ionosphärenparameter für spezielle Stationen werden auf Anfrage zur Verfügung gestellt. Die GFZ-VMF1, eine Lösung, die auf dem Vienna Mapping Function 1 (VMF1) (http://vmf.geo.tuwien.ac.at/) Konzept beruht, aber die Reanalyse ERA5 (https://www.ecmwf.int/en/forecasts/datasets/reanalysis-datasets/era5) verwendet, ist sofort verfügbar unter
ftp://ftp.gfz-potsdam.de/pub/home/GNSS/products/gfz-vmf1/.
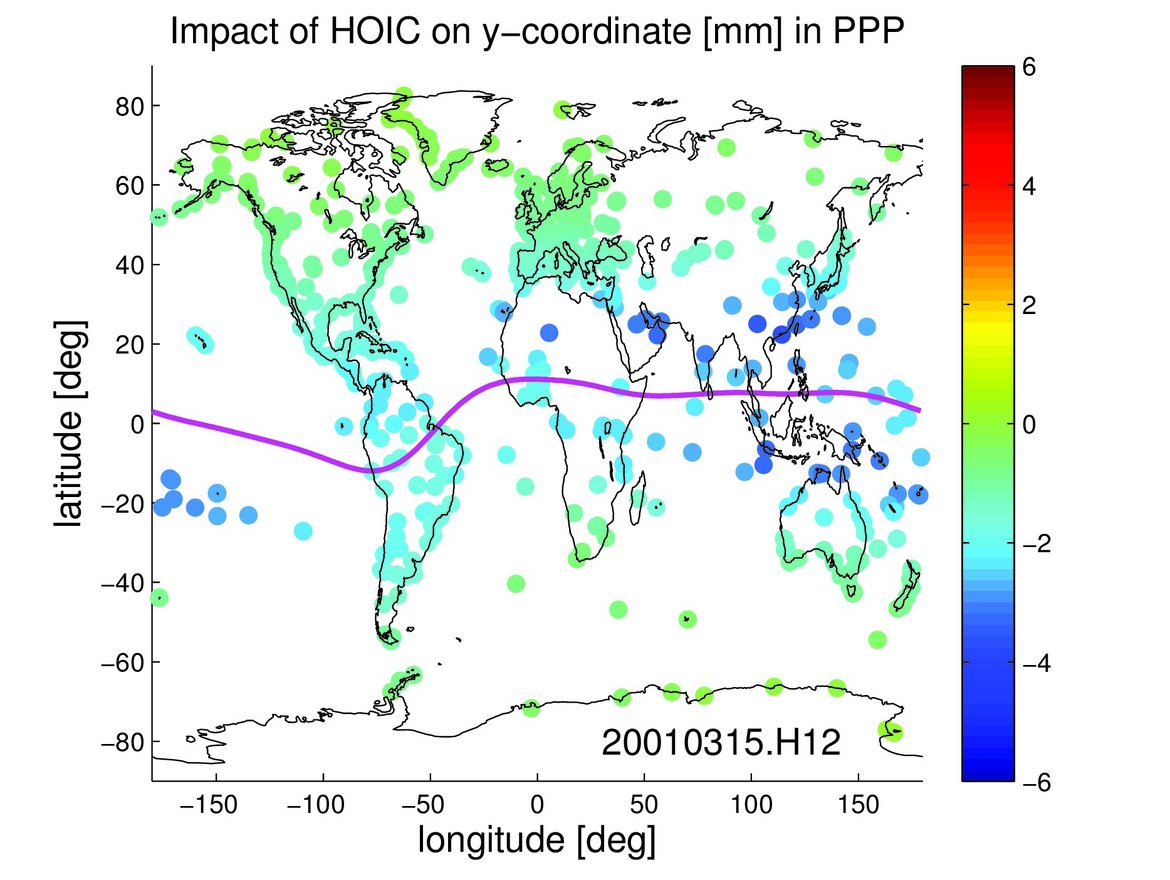
Ein Datensatz (experimentell), der ionosphärische Korrekturen höherer Ordnung (HOIC) für jeden Punkt nahe der Erdoberfläche (Gitter mit einer Auflösung von 2.5° x 5°) enthält, ist verfügbar unter ftp://ftp.gfz-potsdam.de/pub/home/GNSS/products/gfz-hoic/
Kontakt: zusflo@gfz-potsdam.de
Literatur
Zus, F., Dick, G., Dousa, J., Heise, S., and Wickert, J.: The rapid and precise computation of GPS slant total delays and mapping factors utilizing a numerical weather model, Radio Sci., 49, 207–216, doi:10.1002/2013RS005280, 2014.
Zus, F., Z. Deng, and J. Wickert: The impact of higher-order ionospheric effects on estimated tropospheric parameters in Precise Point Positioning, Radio Sci., 52, doi:10.1002/2017RS006254, 2017.
Zus, F., Balidakis, K., Dick, G., Wilgan, K., and Wickert, J.: Impact of Tropospheric Mismodelling in GNSS Precise Point Positioning: A Simulation Study Utilizing Ray-Traced Tropospheric Delays from a High-Resolution NWM, Remote Sens, 13, 3944, doi.org/10.3390/rs13193944, 2021.
Kontakt
