

The GNSS tomography is an attempt to utilize the existing infrastructure of GNSS satellites and networks of geodetic reference stations for meteorological applications. Small deviations of the GNSS signals due to the atmospheric water vapour are used to evaluate the amount of water vapour between a GNSS satellite and each single GNSS ground station. Such kind of integrated information obtained for a large number of different directions can be combined to a spatially resolved field by means of tomographic reconstruction techniques. This leads to temporally and spatially resolved field of the atmospheric water vapour. The GNSS tomography is an innovative remote sensing technique which works under all weather conditions with a high temporal resolution. The GNSS tomography is based on the high precision GPS data analysis as performed by the IGS analysis center at the GFZ. The analysis software EPOS.P.V2 developed at the GFZ is not only used to provide several geodetic products for high precision positioning but is also a basic requirement for numerous applications. Lately, the GPS analysis software has been extended to satisfy the requirements of meteorological applications (see GASP project). Using the advanced geodetic infrastructure available at the GFZ it is possible to separate the GNSS signal delays caused by the atmospheric water vapour from other effects which also modify the signals. These signal delays are the basic input to the GNSS tomography. Currently, the GFZ is processing the GPS data from more than 200 German GPS stations on an operational basis. Approximately 1 million of slant delays, i. e. signal delays along different transmitter - receiver axes, are provided per day.
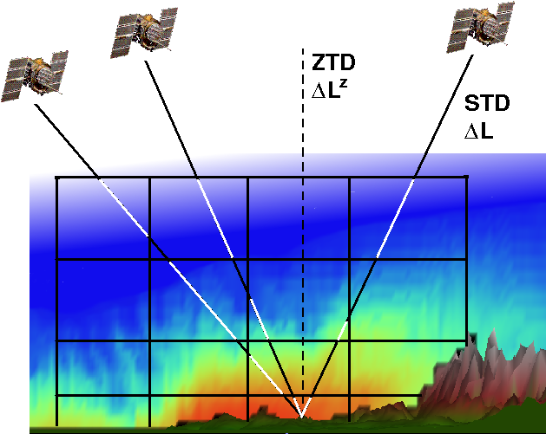
The slant delays are the basic information required to perform the GNSS tomography. The signal delays due to the water vapour are evaluated for a large number of different views through the atmosphere. The reconstruction of a spatially resolved field from such integrated inormations requires the solution of an inverse ill-posed problem with incomplete data. Algorithms which solve these kind of problems are usually referred to as tomographic techniques. The tomography works on a spatial grid and tries to partition the integral slant delays on the different grid cells. If sufficien data are available a spatially resolved filed can be obtained. In case of the GNSS tomography rather sparce data are available, compared with huge volume of the atmosphere. Therefore, additional meteorological observations are usually required to obtain reliable water vapour distributions. Temporally and spatially resolved water vapour fields provide important information for numerous meteorological applications, e. g. nowcasting, numerical weather forecasts including precipitation forecasts and climatology.
The GNSS tomography is a rather new technique in an early state of development but with an enormous potential. New GNSS systems will be available in near future as the European Galileo system becomes operational in 2014 and the Russian GLONASS is currently completely renewed. Even the American GPS will be extended by new signals and services. In total, this leads to about 90 GNSS satellites, up to 30 of them visible at any time. Together with the rapidly growing ground networks this leads to an increasing spatial coverage of the atmosphere.
References
Bender, M. and Raabe, A. Preconditions to ground-based GPS water vapour tomography, Annales Geophysicae, 2007, 25, 1727-1734
Bender, M.; Dick, G.; Wickert, J.; Schmidt, T.; Song, S.; Gendt, G.; Ge, M. and Rothacher, M. Validation of GPS Slant Delays using Water Vapour Radiometers and Weather Models, submitted, 2008
