

ArGID
GNSS signals are transmitted at L-band radio frequencies. These radio signals are known for their particular properties related to water in its liquid and solid state. They easily penetrate dry snow, however, they are almost entirely reflected at the sea surface. The interpretation of reflected GNSS signals is, therefore, promising in order to characterize sea ice that holds properties of solid and liquid water. The sea ice structure and its thickness are important to assess the Arctic and Antarctic sea ice cover under the tremendously changing climate conditions in the polar regions.
Measurements of the reflected signal's amplitude allows retrieve the sea ice concentration and potentially its structure, especially water content, salinity and roughness. The Doppler shift resolution of the reflected signal is expected to, additionally, provide information on the sea ice thickness.
The ArGID project explores ice observations gathered by a GNSS reflectometry setup, run by GFZ, during a dedicated ship expedition, lead by the Norwegian Polar Institute (NPI). The expedition of the Norwegian research vessel “R/V Lance” collects data of ocean and sea ice properties in Fram Strait, at the major link between the Arctic and the Atlantic Ocean. Similar GNSS reflectometry setups (based on the GORS receiver) have been used for coastal and airborne experiments [Semmling et al. 2011, 2014].
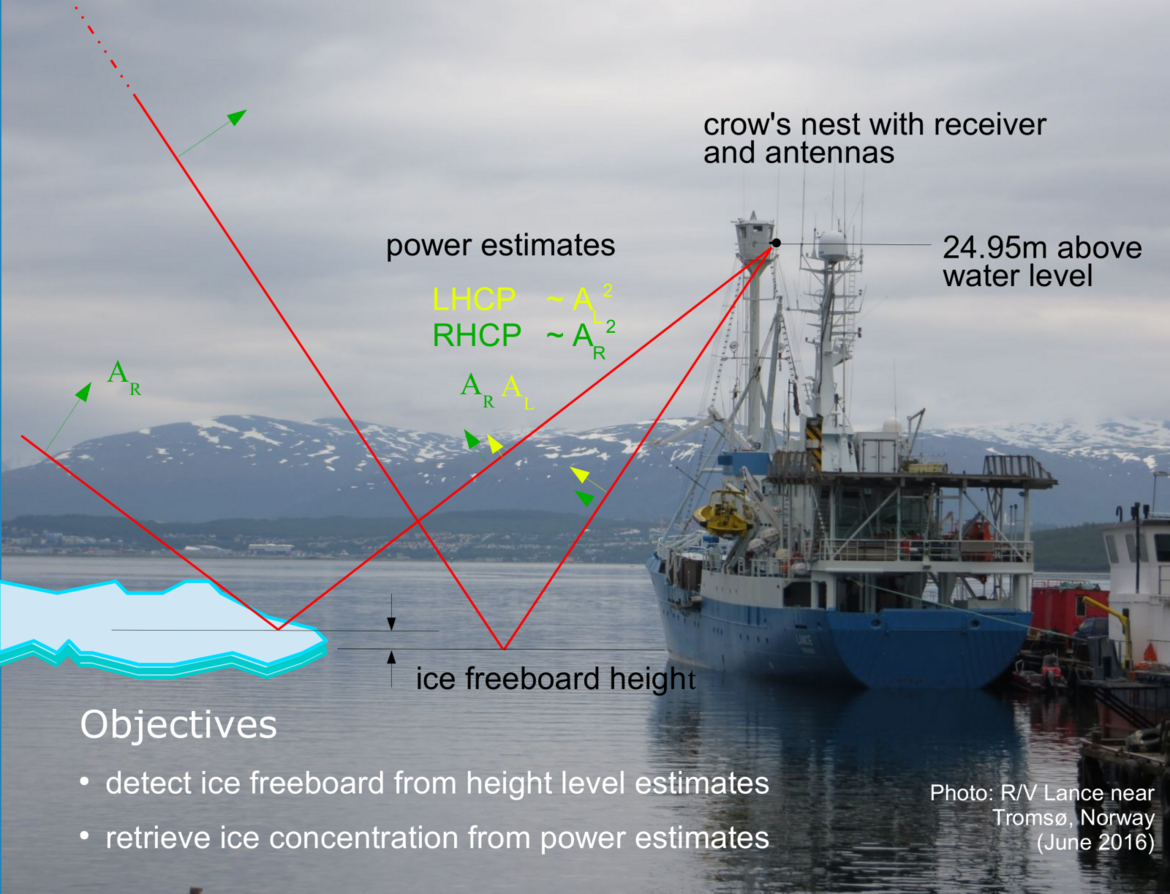
The concept of measurements and the anticipated objectives in the ArGID project are shown in Fig. 1.
The GNSS setup slightly differs from common shipborne equipment. It uses two starboard-looking antenna links with right- and left-handed circular polarization (RHCP, LHCP) and one up-looking antenna. The links are mounted close to each other at the crow's nest in almost 25m above water level. The reflection power at RHCP and LHCP signal components can be retrieved from the starboard-looking link antennas.
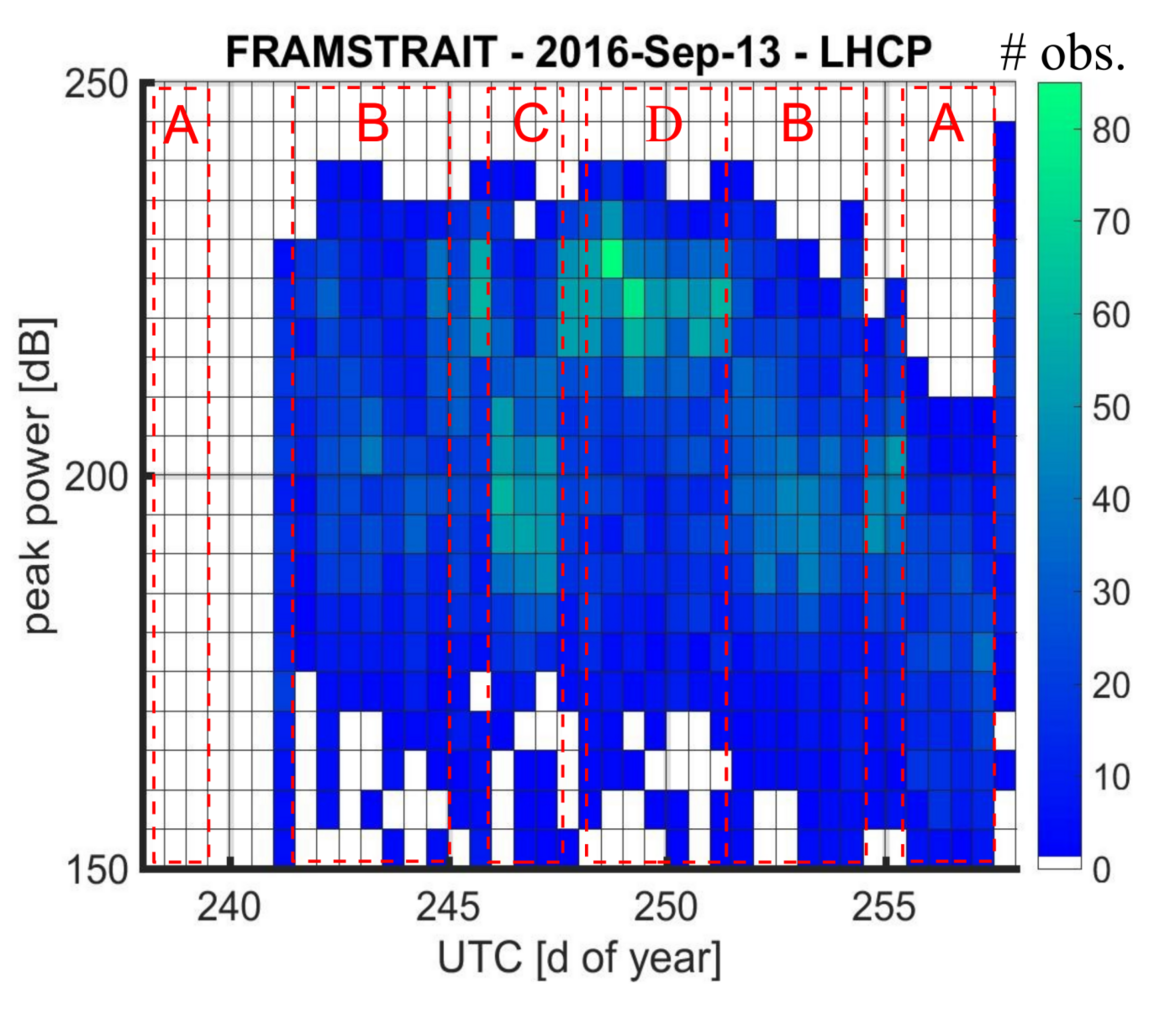
The power of the reflection peaks show significant features related to sea ice, see Fig. 2.
High ice concentration periods (B,C), a calm open water period (D) and the high sea state period (A) differ by peak power distribution. Highest power refers to D, significantly reduced power refers to B,C and lowest power (with higher noise, not shown) indicates period A.
More details on the initial results have been presented [Semmling et al. 2017]. Measurements during 2017 Fram Strait cruise to confirm the 2016 results are currently prepared.
References
Semmling, A. M.; Beyerle, G.; Stosius, R.; Dick, G.; Wickert, J.; Fabra, F.; Cardellach, E.; Ribo, S.; Rius, A.; Helm, A.; Yudanov, S. & d'Addio, S. Detection of Arctic Ocean tides using interferometric GNSS-R signals Geophysical Research Letters, 2011, 38, L04103
Semmling, A. M.; Beckheinrich, J.; Wickert, J.; Beyerle, G.; Schön, S.; Fabra, F.; Pflug, H.; He, K.; Schwabe, J. & Scheinert, M. Sea surface topography retrieved from GNSS reflectometry phase data of the GEOHALO flight mission Geophysical Research Letters, 2014, 41, 954-960
Semmling, M.; Rösel, A.; Ludwig, M.; Bratrein, M.; Gerland, S. & Wickert, J. A Fram Strait Experiment: Sensing Sea Ice Conditions using Shipborne GNSS Reflectometry Geophysical Research Abstracts, EGU General Assembly, 2017, Vol. 19
